Cats have long been adored for their unique and endearing behaviors, and one such behavior that stands out is their head rubbing or bunting. When a cat presses or rubs its head against a person, it’s commonly perceived as an expression of affection. But there may be more to this behavior than just love and companionship—this act could also have a soothing or even healing effect on the person involved. Understanding why cats engage in bunting and exploring the possibility of replicating such behavior has led to innovative research and interesting findings about the intersection of robotics and human interaction.
What Is Bunting?
Bunting, which is when cats rub their heads or faces against a person or object, is a behavior often associated with social bonding and affection. Felines engage in bunting to communicate with other cats and humans, marking their territory or offering a gesture of comfort. The head rubs allow them to exchange scents, with their scent-producing glands located near their cheeks. These rubs signal acceptance and affection, creating a bond and expressing a sense of closeness.
This behavior has a tangible impact on human emotions. People often report feeling relaxed, comforted, and even happy after receiving a cat’s head rub or nuzzle. As a result, many pet owners note that their cat’s rubbing behavior has a calming effect on their mood and mental state. Could this feline gesture go beyond affection and truly impact physical and emotional well-being? And more importantly, could it be replicated in robotics to benefit human health?
The Study and Development of a Robot Mimicking Bunting
A fascinating study, published in the ACM Transactions on Human-Robot Interaction journal, sought to answer these questions by exploring how the behaviors associated with bunting could be emulated using robots. Researchers aimed to develop a robot that would not only mimic the head rubbing motion of a cat but also investigate how such a motion might influence human participants’ mood and overall sense of well-being.
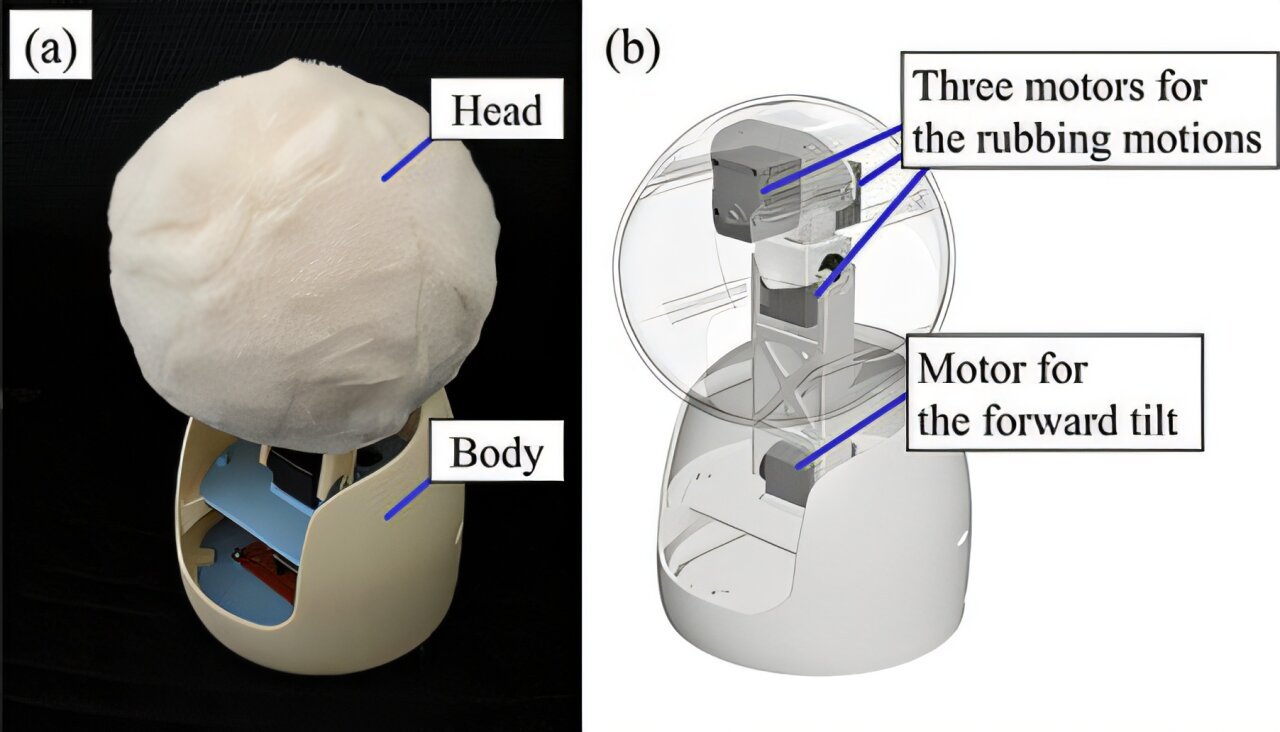
One of the key components of this experiment was replicating the bunting movement with a robot. The challenge was to create a robot that could not simply perform a static, mechanical movement, but instead emulate the variable and fluid nature of the head movement cats exhibit while rubbing against a human. In order to replicate this behavior convincingly, the robot had to be equipped with a flexible neck or cervical vertebrae that could adjust its rigidity, allowing the motion to change dynamically, much like a cat’s natural movements.
The researchers incorporated a variable stiffness mechanism in the robot’s neck—designed to modify its rigidity based on the level of tension or force required during the bunting motion. This flexibility is an essential component, as a head rub can vary in intensity, pressure, and duration depending on the situation.
Experiment Setup and Participants
To test the potential effects of a robot that mimicked bunting behavior, the research team conducted a series of controlled experiments involving 22 university students. These participants were exposed to the robot for a period of 40 seconds, during which the robot performed its simulated bunting behavior. The experiment involved three distinct stiffness settings to explore whether the robot’s neck rigidity influenced the participants’ perception of the bunting motion:
- Low Stiffness: In this setting, the robot had a relatively soft and flexible neck. The robot’s head rubbed gently against the participants at a low force.
- High Stiffness: Here, the robot’s neck was more rigid, causing the movement to be more forceful or abrupt compared to the low stiffness setting.
- Variable Stiffness: This setting allowed the robot to dynamically adjust its rigidity based on how much force was needed in each motion, mimicking the variability in pressure seen in a cat’s head rub.
The study’s participants were asked to assess their mood and emotional state both before and after the interaction with the robot. The tool used to measure these mood changes was a temporary mood scale questionnaire that asked participants to rate their emotions in terms of tension, relaxation, and other mood metrics.
Results: Tension Reduction and Participant Feedback
The results of the study revealed some promising findings. After interacting with the robot in all three stiffness settings, the participants reported a significant reduction in their tension levels. This is consistent with the way people often feel more relaxed and less stressed after interacting with a cat that engages in bunting. What is particularly intriguing is that the variable stiffness setting led to the greatest reduction in tension among participants, suggesting that a robot capable of adjusting its rigidity to better match the human experience of a cat’s behavior could have unique therapeutic benefits.
However, while the variable stiffness setting produced noticeable tension relief, no statistically significant difference in tension reduction was found across the three stiffness settings when examined more closely. It’s important to note that this could be due to the small sample size or the nuances involved in human emotional responses, which can vary significantly across individuals.
Nevertheless, some participants expressed a clear preference for the variable stiffness motion, citing the sense of realism it provided compared to the other more rigid movements. These subjective responses from participants indicate that the variability in stiffness might enhance the emotional connection between the human and robot, giving an impression of more lifelike behavior.
Implications for Human-Robot Interaction and Wellness
The findings of this study contribute to a rapidly expanding field of research into the role of robots in promoting human health and emotional well-being. This experiment is an excellent example of how understanding and replicating natural animal behavior in robots can lead to innovative applications in therapy and human-robot interaction.
In fact, beyond the obvious therapeutic potential of replicating animals’ healing touch through technology, robots could eventually be used to assist in other forms of emotional care. For example, robots could be employed to interact with people who suffer from anxiety, depression, or loneliness. Bunting, as a form of affectionate communication, could be leveraged to foster relaxation and comfort, especially for individuals who lack the companionship of a pet.
In addition, robots with such mimetic behaviors might find use in elder care facilities or environments where therapeutic companionship is needed but animals cannot be present. Elderly individuals with limited mobility or cognitive challenges, for instance, might benefit from a robot capable of providing affectionate physical touch, leading to improvements in mood and emotional well-being.
While human-robot interaction remains a work in progress, these findings suggest that robots programmed with empathy-driven behaviors might one day play a crucial role in alleviating some of the stress and anxiety commonly faced by people in today’s busy and challenging world.
Conclusion: Robots as Affectionate Helpers
The study of the bunting robot underscores a fascinating and promising intersection of technology and emotional health. The robotic head rubbing mechanism highlights not only the adaptability of robots but also their potential to bring a measure of calm and affection to the human psyche, similar to the cherished behavior of cats. Whether it’s a reduction in tension, a sense of well-being, or simply the comfort of a gentle gesture, the future of robotics could offer far more than automation—it might serve as a source of healing and emotional support.
In the future, this research might help develop robots that act as caregivers or companions, serving as a means of interaction that is not only beneficial for physical tasks but also provides emotional nurturing, creating deeper bonds between humans and their technological counterparts. Although there is still much work to be done, these early findings offer a compelling glimpse into how robots can one day replicate behaviors of affection in ways that positively influence human wellness and companionship.
Reference: Yuga Adachi et al, Development of a Robotic Device that Performs Head Bunting to Relieve User Tension, ACM Transactions on Human-Robot Interaction (2024). DOI: 10.1145/3700600