Bio-inspired wind sensing using strain sensors on flexible wings is poised to revolutionize robotic flight control strategies, providing insights into how nature-inspired technology can improve the adaptability and precision of aerial robots. Researchers at the Institute of Science Tokyo have achieved a breakthrough in this field, developing a method that detects wind direction with remarkable accuracy using strain sensors and advanced machine learning algorithms. This advancement draws inspiration from the natural strain receptors found in birds and insects, offering new possibilities for the future of robotic flight.
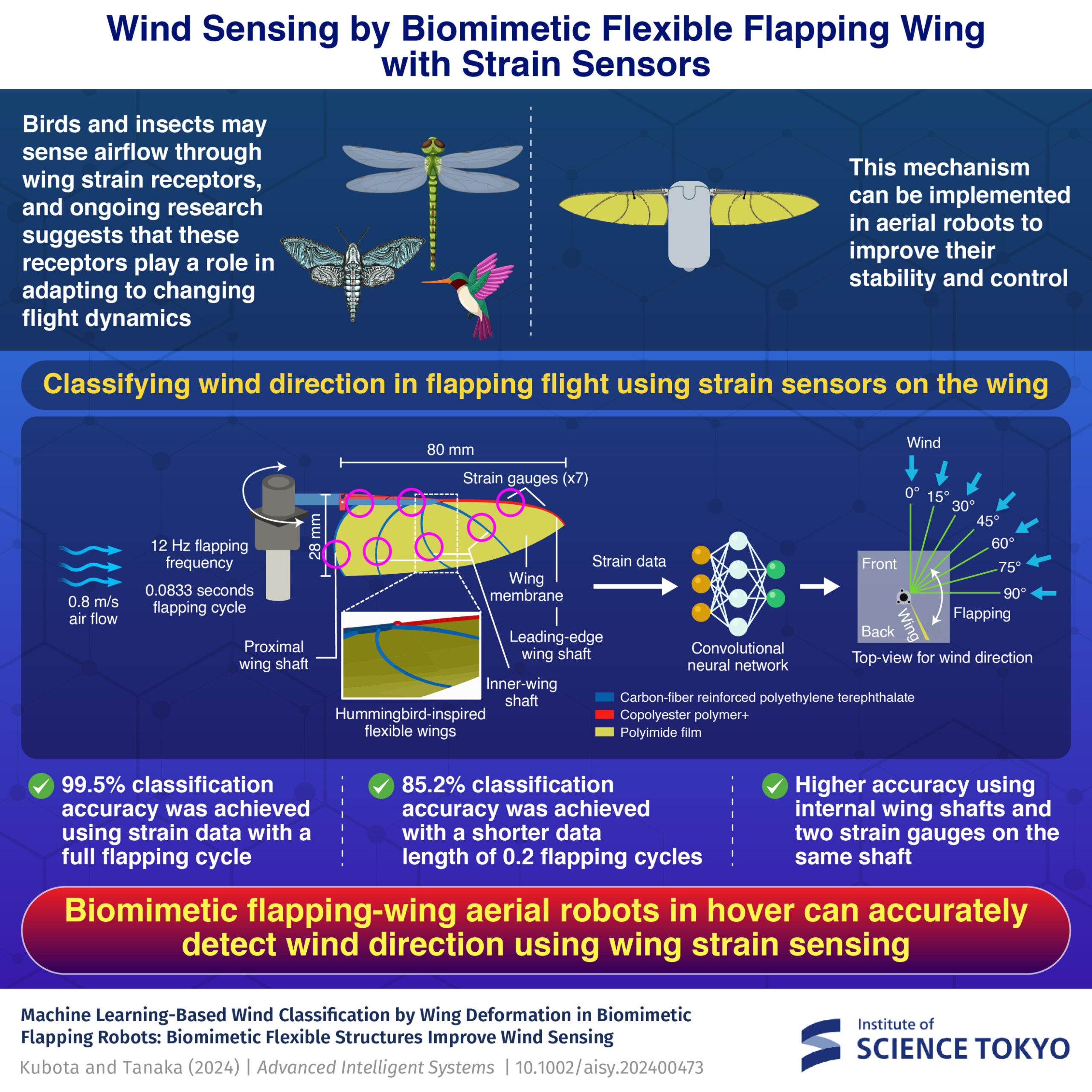
In the natural world, birds and insects exhibit extraordinary flight capabilities, adjusting their movements with precision in response to changing environmental conditions. These abilities are partially attributed to specialized mechanical receptors on their wings. These receptors detect strain, enabling the creatures to sense wind direction, body movement, and external stimuli. This natural mechanism allows them to make rapid, responsive adjustments during flight, ensuring stability and control. Inspired by these biological systems, researchers have sought to replicate this functionality in robotic platforms by exploring biomimetic flapping wings equipped with strain sensors.
A recent study, published in Advanced Intelligent Systems on November 11, 2024, marks a significant step forward in this area. Led by Associate Professor Hiroto Tanaka and his team at the Institute of Science Tokyo, the research investigates the use of strain sensors on flexible, hummingbird-mimetic wings. The study focuses on detecting flow directions in tethered flapping mechanisms within a wind tunnel, simulating hovering flight under gentle wind conditions. The findings demonstrate how such systems can revolutionize the flight control of small aerial robots.
Small aerial robots face significant challenges in incorporating conventional wind-sensing devices due to weight and size constraints. These robots often operate in environments where precise wind detection is crucial for stability and navigation. “Small aerial robots cannot afford conventional flow-sensing apparatus due to severe limitations in weight and size. Hence, it would be beneficial if simple wing strain sensing could be utilized to directly recognize flow conditions without additional dedicated devices,” explains Tanaka. By leveraging strain sensors integrated into flexible wings, researchers have created a lightweight, efficient, and highly accurate method for detecting wind conditions.
The experimental setup consisted of seven strain gauges, which are cost-effective and widely used in engineering applications, attached to a flexible wing structure. These wings, inspired by the natural design of hummingbird wings, were constructed using tapered shafts supporting a wing film, closely mimicking the biomechanics of bird wings. The wings were mounted on a flapping mechanism powered by a DC motor connected via a Scotch yoke mechanism and reduction gears. This setup enabled a back-and-forth flapping motion at a frequency of 12 cycles per second, replicating the flapping rate of a hummingbird.
To test the system, researchers placed the mechanism in a wind tunnel and applied a gentle wind of 0.8 m/s. The strain sensors recorded data as the wings flapped under seven different wind directions (0°, 15°, 30°, 45°, 60°, 75°, and 90°) and one no-wind condition. Using this data, a convolutional neural network (CNN) model was trained to classify wind directions. The results were groundbreaking: the system achieved a classification accuracy of 99.5% using data from a single flapping cycle. Even with shorter data lengths of just 0.2 flapping cycles, the accuracy remained impressive at 85.2%.
The study further revealed the importance of using multiple strain sensors for accurate wind detection. When using data from only one strain gauge, the classification accuracy ranged from 95.2% to 98.8% for a full flapping cycle. However, this accuracy dropped significantly to 65.6% or less when shorter data lengths were used. These findings highlight the advantages of integrating multiple strain sensors across the wing surface to enhance wind-sensing capabilities.
The design of the wing itself also played a crucial role in the system’s performance. By removing the inner wing shafts, researchers observed a decrease in classification accuracy. The reduction was 4.4% for 0.2-cycle data and 0.5% for full-cycle data when all strain gauges were used. For configurations using only one strain gauge, the accuracy decrease averaged 7.2% for full-cycle data and 6% for 0.2-cycle data. These results underscore the importance of the biomimetic wing shaft structures in enhancing wind-sensing performance, further validating the design’s alignment with natural principles.
The implications of this research extend beyond robotics. The findings contribute to a deeper understanding of how hovering birds and insects may perceive wind through the strain sensing of their wings. This knowledge could shed light on the evolutionary adaptations that have enabled these creatures to achieve remarkable flight precision. Furthermore, the study lays the groundwork for the development of advanced biomimetic aerial robots capable of operating effectively in complex and dynamic environments.
“This study contributes to the growing understanding that hovering birds and insects may sensitively perceive wind through strain sensing of their flapping wings, which would be beneficial for responsive flight control. A similar system can be realized in biomimetic flapping-wing aerial robots using simple strain gauges,” concludes Tanaka. By combining nature-inspired designs with cutting-edge technology, this research opens up new possibilities for the development of lightweight, efficient, and adaptable aerial robots.
In the future, such robots could play critical roles in a wide range of applications, from environmental monitoring and disaster response to agricultural surveying and infrastructure inspection. By equipping them with bio-inspired wind-sensing capabilities, researchers are paving the way for a new generation of aerial robots that can navigate challenging environments with unparalleled precision and adaptability. This breakthrough demonstrates the power of biomimicry, where learning from nature continues to inspire innovative solutions to some of the most pressing technological challenges.
Reference: Kenta Kubota et al, Machine Learning‐Based Wind Classification by Wing Deformation in Biomimetic Flapping Robots: Biomimetic Flexible Structures Improve Wind Sensing, Advanced Intelligent Systems (2024). DOI: 10.1002/aisy.202400473